ich glaube, er ist jetzt fertig: Mein Gleisbild-Editor.
Im Endeffekt eine kleine Webseite mit ein bischen Javascript.
Und so sieht das Ergebnis momentan aus:
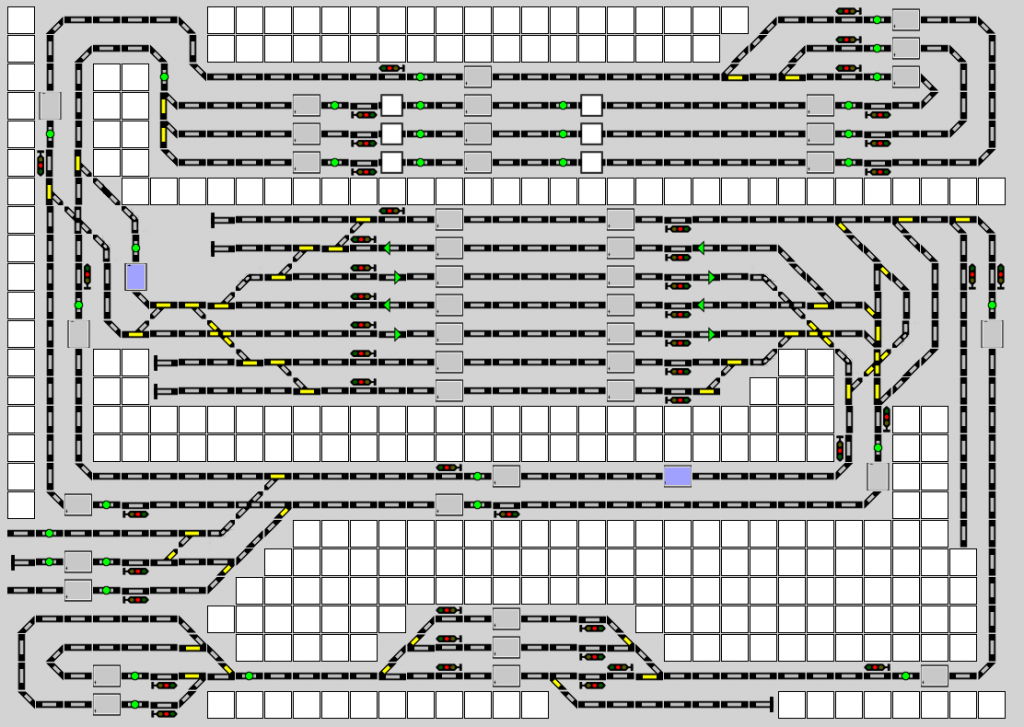
Die Symbole hab ich aus einer Rocrail-Installation kopiert. Ein paar habe ich selbst erstellt.
Im Betrieb sendet der Server über Websocket Befehle an den Webbrowser, der die Darstellung daraufhin ändert. Getestet habe ich es schon, aber es wird noch weitaus komplizierter. Macht aber Spass, wenn man mal etwas sieht.
Das ganze dient eigentlich nur zur Anzeige. Man schaltet später die gewünschten Weichenstrassen und Signale mit dem mobilen Handregler.